The Problem:
Motor controller technology exists, yet current approaches each have inhibiting flaws (i.e.. standard lookup tables are time-consuming, occupy large memory usage, and have little control accuracy). While driving a car, different speeds translate into torque, and current leading methods convert torque inefficiently.
The Solution:
Utilize a neural network (NN) approach to determine MTPA, flux-weakening, and MTPV operating points over the full speed range to maximize torque efficiency of an IPM motor. NN training data is generated, and the impact of variable motor parameters is embedded into the NN system for improved performance. A fast and accurate current reference generation is achieved using a simple NN structure, that can handle the MTPA, MTPV, and flux-weakening operation considering physical motor constraints.
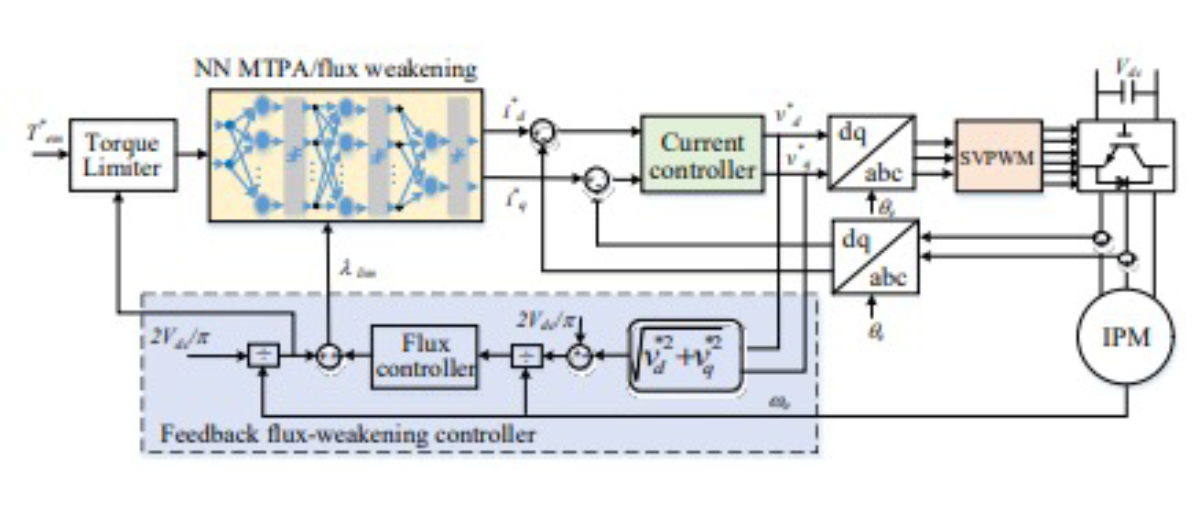
Example neural-network, IPM motor drive and control system
Benefits:
·More compact and cost efficient than other leading methods.
·Provides highly efficient and accurate torque control, uses less memory storage, and allows analyzation of the nonlinear impact of variable control parameters.
·While other methods have been proposed that utilize a neural network approach, many only address MTPA and flux-weakening, but do not mention the operating point of the MTPV or the use of the Levenberg-Marquardt algorithm to avoid disadvantages of online NN training.
Patent:
US12162471B2
Benefits:
The University of Alabama Research Office of Innovation and Commercialization (OIC) is a non-profit corporation that is responsible for commercializing University of Alabama technologies and for supporting University research. At OIC, we seek parties that are interested in learning more about our technologies and commercialization opportunities, and we welcome any inquiries you may have.