The Problem:
Current conventional walkers have several problems including that the user must pick up and manually push the walker forward, users have to bend over to reach the walker's support, and current walkers require a lot of energy and strength to operate. A mobility aid that serves the necessary functions of providing physical support and a sense of security while promoting the use of the user's lower limbs can have significant advantages to their health and lifestyle.
The Solution:
Researchers at the University of Alabama have developed a motorized robotic walker guided by an image processing system for human walking assistance. The proposed motorized walker moves with the user, allowing the user to focus their effort and energy on walking and not guiding or pushing the walker. This is accomplished using a three-dimensional camera image processing system. The invented algorithm also ensures that the walker remains availably to provide assistance to the user as needed. Additionally, the walker is adjustable to allow the user to stand up straight in their natural walking posture.
 Standard Walker
Standard Walker
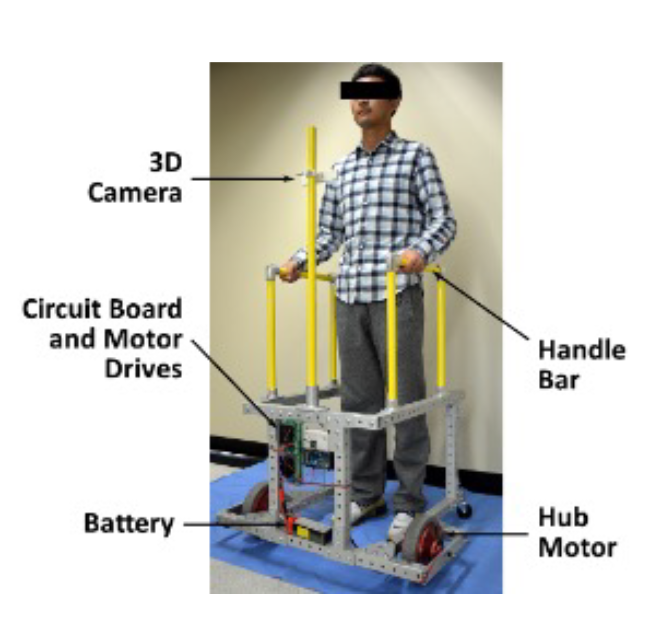 Motorized Walker Prototype
Motorized Walker Prototype
Benefits:
•Incorporates automatic navigation into a robotic walker.
•Walker does not disturb the user's walking rhythm.
•Reduces the user's metabolic energy consumption.
•Can also be used as a rehabilitation device.
•Gives users a better sense of independence.
•Tracks the user to ensure that it remains oriented & the walker remains accessible for physical support.
The University of Alabama Research Office of Innovation and Commercialization (OIC) is a non-profit corporation that is responsible for commercializing University of Alabama technologies and for supporting University research. At OIC, we seek parties that are interested in learning more about our technologies and commercialization opportunities, and we welcome any inquiries you may have.